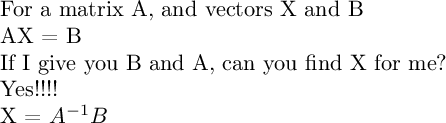
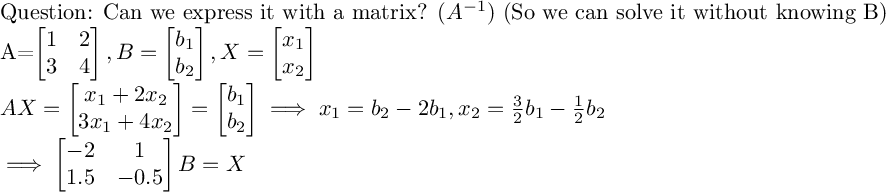
Inverse of Matrix


(-5.999999999999998, 4.999999999999999)
(4.0, 2.0000000000000036)
[-1.9999999999999996 0.9999999999999998]
[ 1.4999999999999998 -0.4999999999999999]
Interact: please open in CoCalc
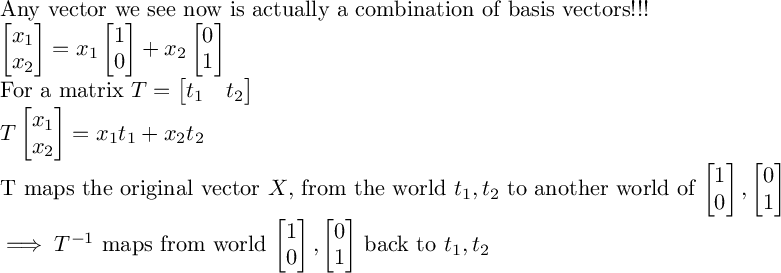
Change of Basis
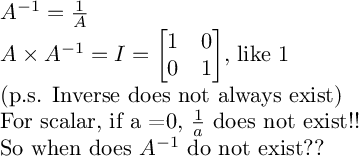
Sometimes Does not exist
If => multiple vectors in T's world maps to the same vector in world and
Cannot map back!!!
exists if and only if all cannot be form by any other basis except itself.
Impossible to find for any a and b. (3 dimensional case)
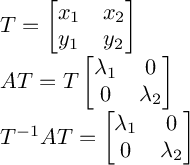
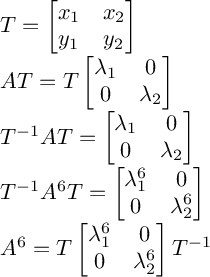
Diagonalization
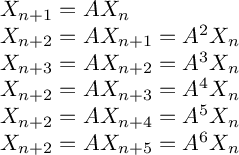
Longterm Effect
Can we find ?
Can we find ?
=
(1.3333333333333335, 0.6666666666666665)
(2.4666666666666663, -7.466666666666666)
(-4.0, 0.0)